
今シーズン、社内マルチワーク化の一環で初体験することとなった怒涛の車海老出荷を2/29に完了し、ひと息ついている“新人”(と名乗れるのも今月までの)Daikiです!
havメンバに加わってすぐに取水ポンプの完全自動運転化にチャレンジしていますが、実際に開発を進めていくと、システム検証&評価工程で少し足踏みしています。計画立案した時に比べて時間を要してしまっている理由は、私が開発しているシステムが予想外の動きをしてしまうことによってポンプを壊してしまうリスクを回避させる必要があったためです。
仮に意図せずポンプを壊してしまうと修理費用が掛かるだけでなく、池に取水が出来なくなる事態を招いてしまいます。例えば、冬場は車海老の活性が低く、珪藻の量も少ないため、酸欠リスクは低いのですが、水温が低くなり過ぎると車海老を斃死させてしまいます。この事態を回避するために冬場は養殖池より暖かい海水を汲み上げます。ポンプを稼働させられなくなってしまうと、水温低下を招き損害を出してしまう。そんなリスクを回避しながらシステム開発は慎重に進めています。

今回、私たちが管理している養殖場の場合、取水ポンプの運転を完全自動化するにあたっては、外海の潮位に合わせてシステムの動きを変える必要があります。理由は干潮時に取水口が水面に露出してしまうため。ポンプを壊してしまうリスクは、この環境条件下で“開発中”のシステムが意図せずONしてしまうケースを想定しています。
また、システムを検討するにあたっては、干満以外にも複数台のポンプを同時に動作させて不用意にピーク電力を上げないための制御や夫々の池の特長や水質を観ながら取水量をコントロールするなど、経済面や生産している車海老の品質や環境にも配慮したシステムを実現しようとしている点で制御が複雑さを増し、その分、リスクを高めています。が、これを解決することこそが、私がチャレンジする意義です♬

天草は全国の中でも干満差が大きいことが知られていますが、一般的に潮の満ち引きは、毎日、約50分ズレ、大潮や小潮などあり潮位の変化は一定ではありません。この環境条件から1シーズンの運用を見据え、評価&検証条件を洗い出し、その条件が整う日時に1つ1つ評価&検証をしていく…
このすべての検証&評価を条件が整うオンタイムで実行していると、若いとはいえ、さすがに私のカラダも持ちません。(;・∀・)
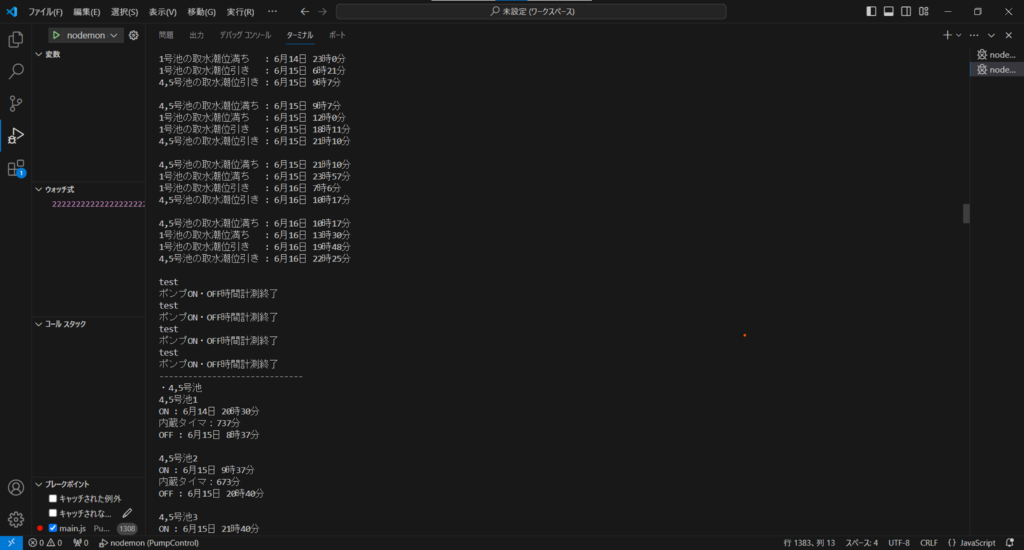
そこで、ひと工夫することに!時間に依存する部分の検証&評価を実時間に捉われず実行するために疑似的に時間を経過させ自動運転の動きを可視化する仮想環境を開発することにしました♬
先月、この環境構築にナントカ目途が立ち、今月から検証&評価に取り掛かります。
次シーズンに向け、養殖池への取水がスタートする5月迄に、私が初挑戦している『スマート化システム』を確実に現場実装して、一緒にマルチワークしているhavメンバの生産性とQOLを高めてみせマス!( ̄― ̄)


